Robotics-Academy exercises

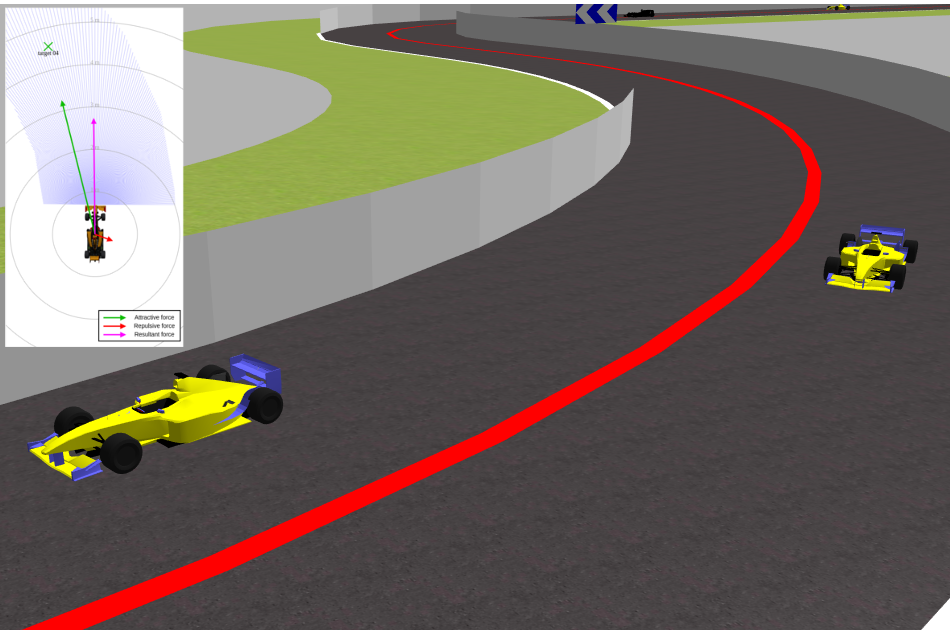
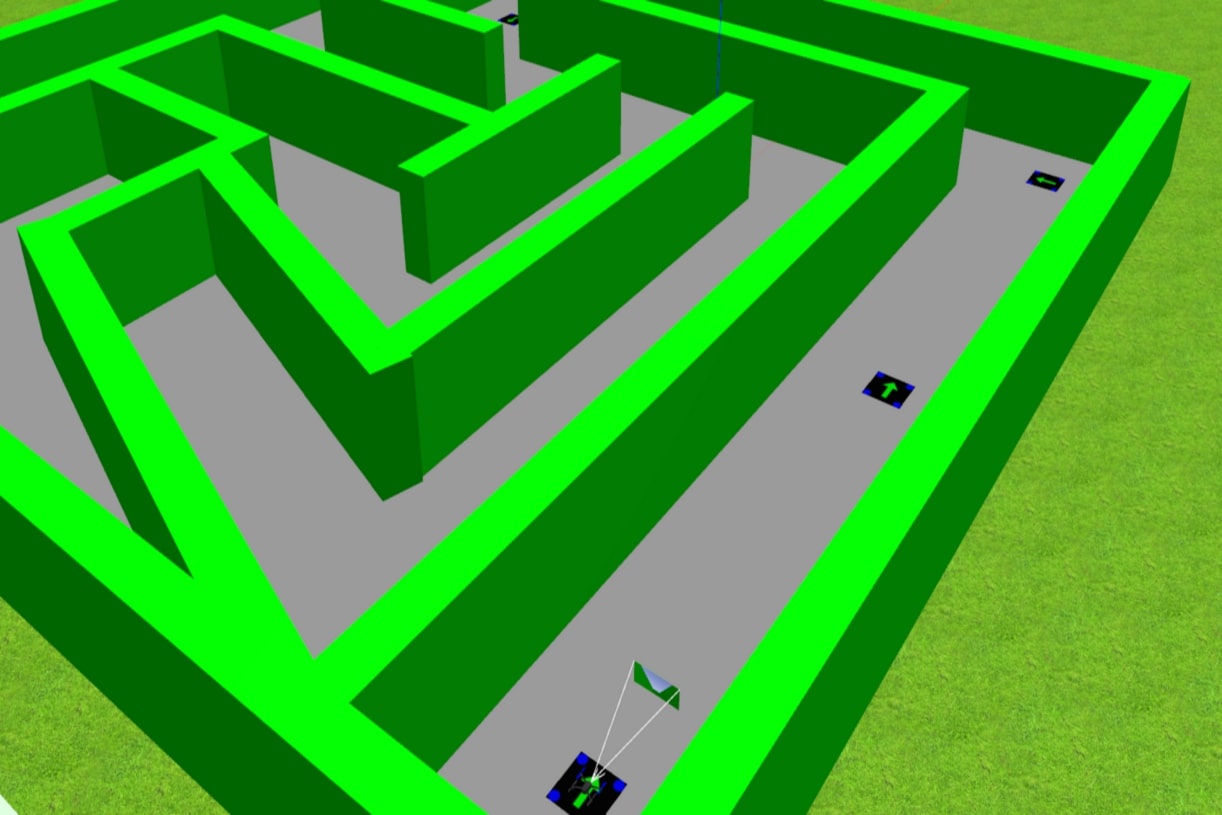
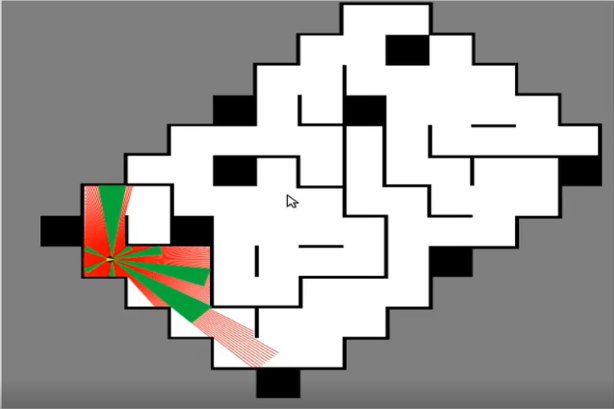
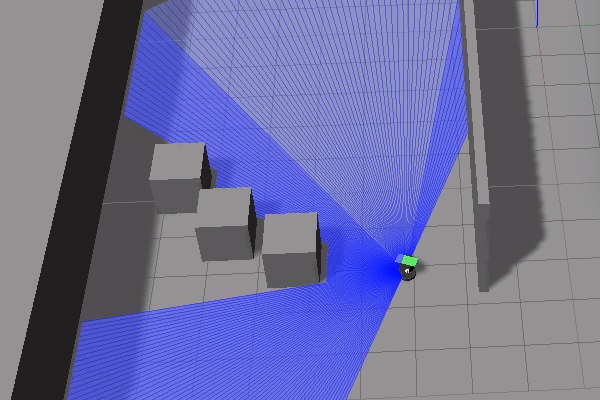
Obstacle avoidance
Local navigation. Virtual Force Field navigation algorithm using a F1.
Go! running - v3.2
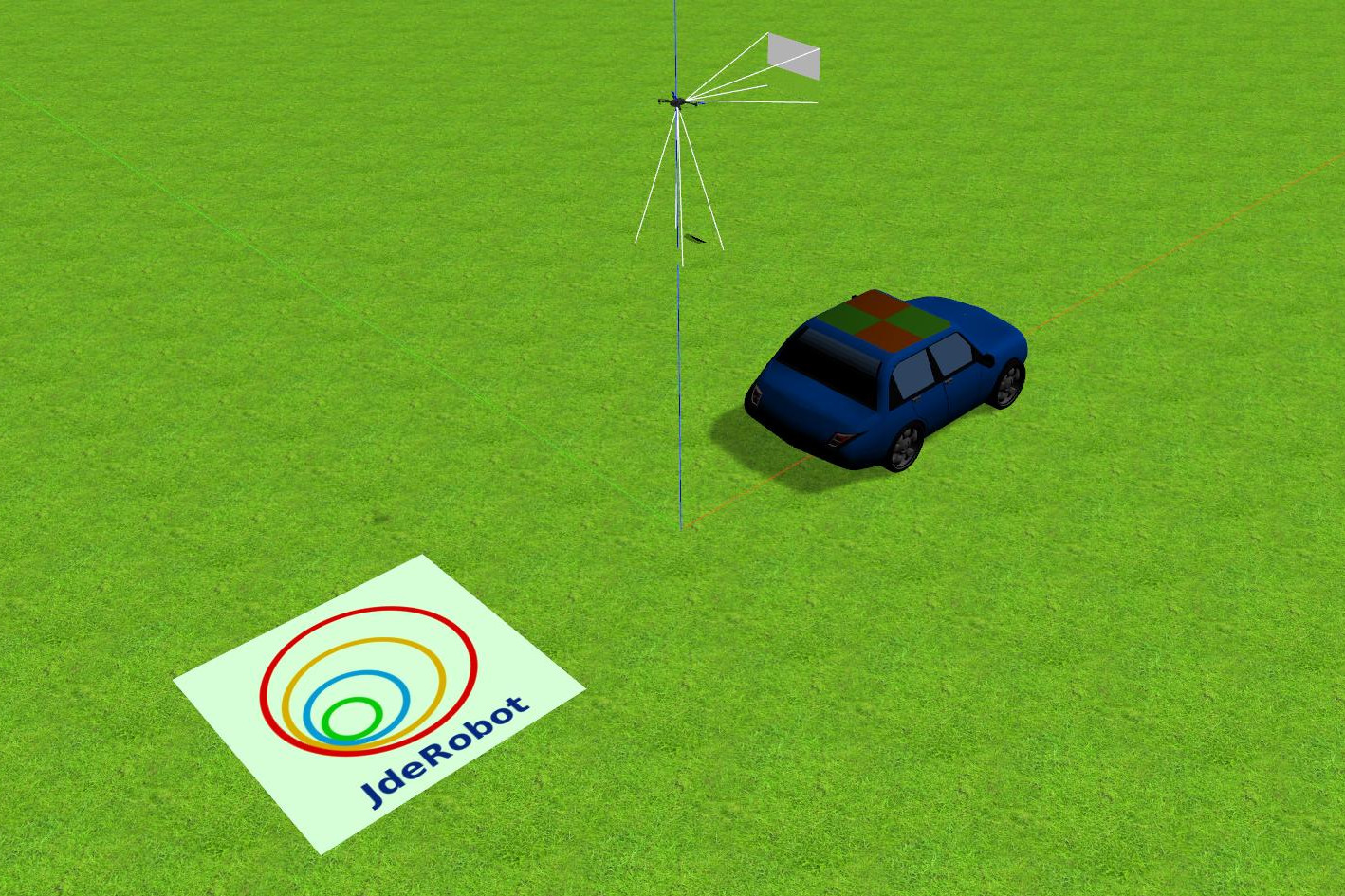
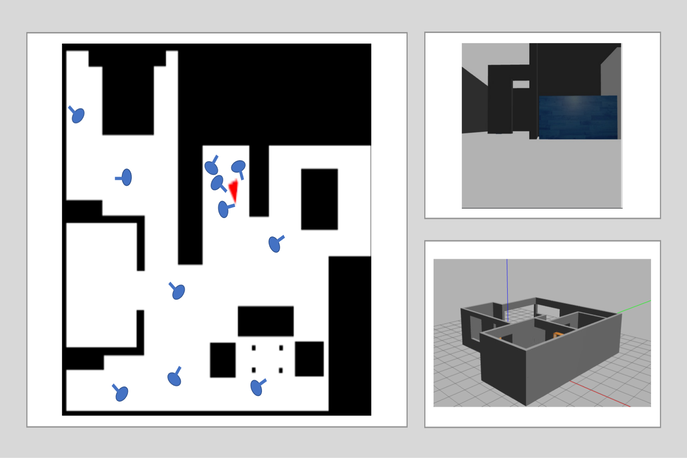
Localized Vacuum Cleaner
Foraging algorithm for an autonomous vacuum with good localization.
Go! running - v3.2
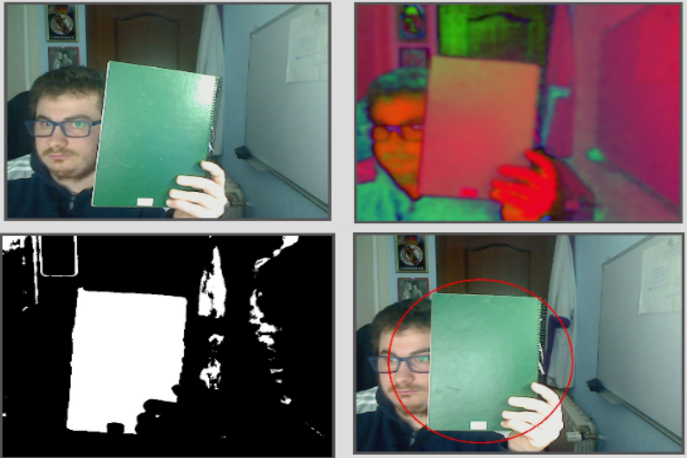
Color Filter
Develop a color filter to segment some object in the image and track it
Go! running - v3.2

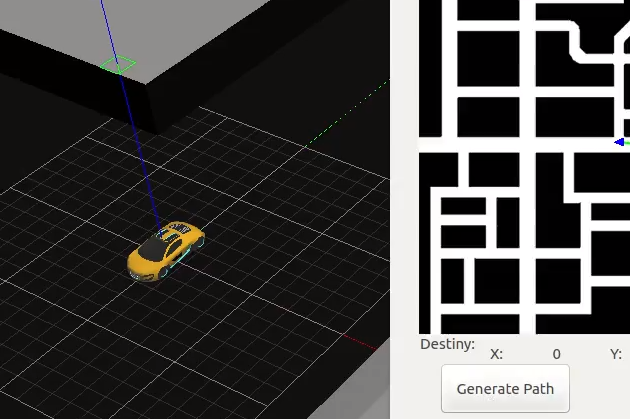
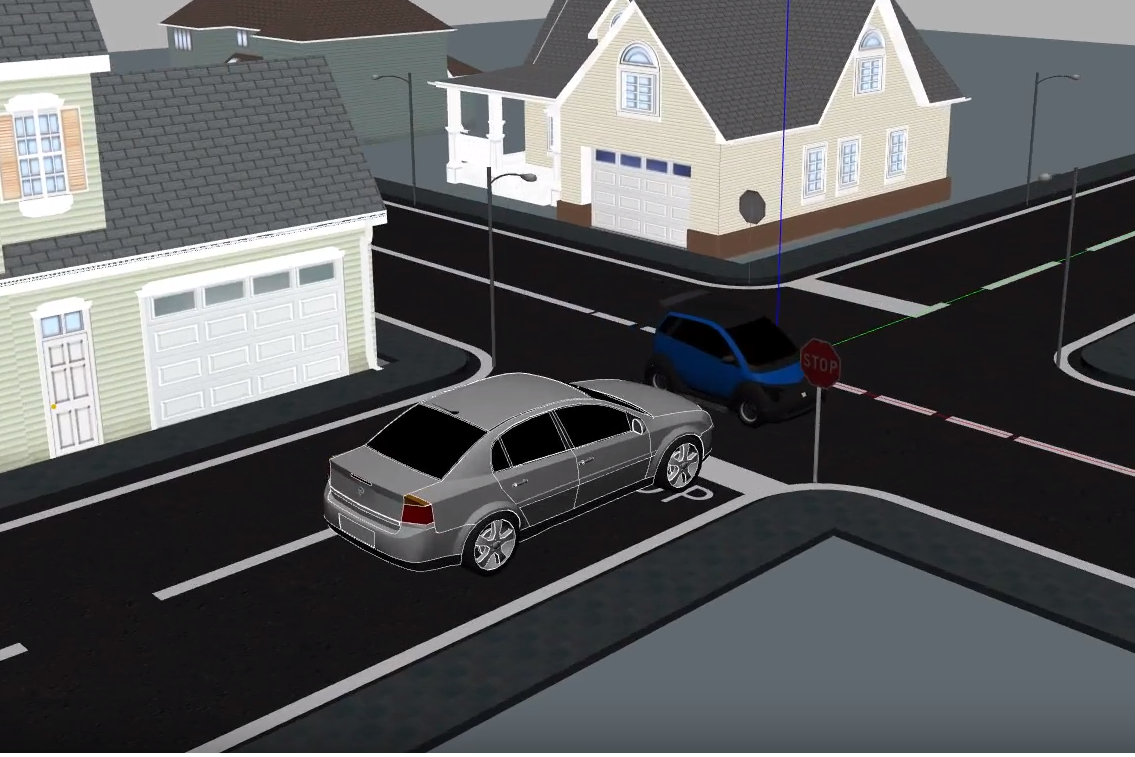
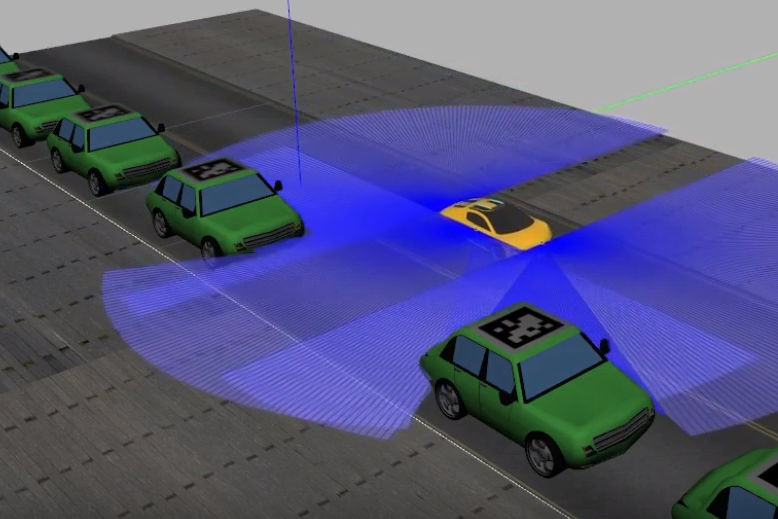
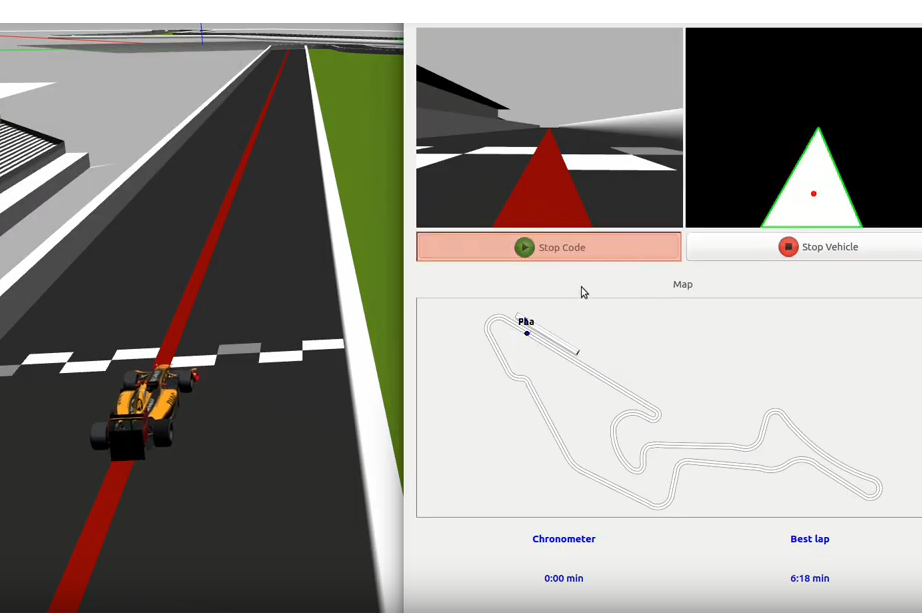
Road Junction
Car Junction. Automated vehicle must stop and pass once the road is clear.
Go! running - v3.2
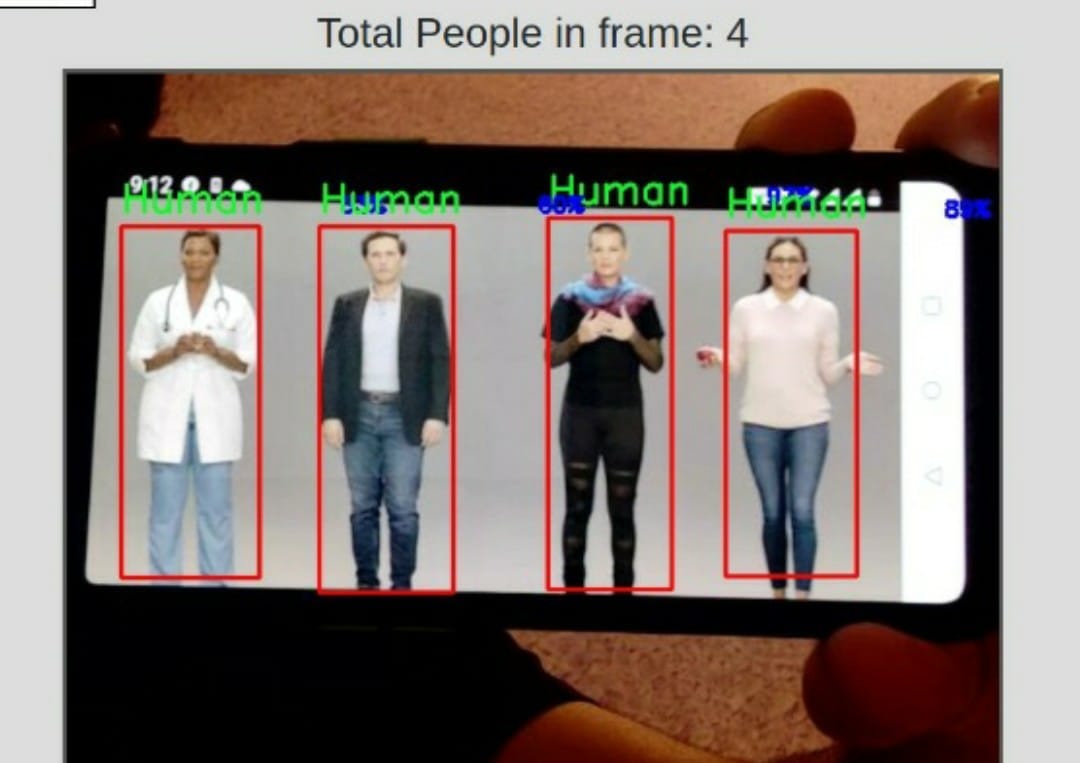
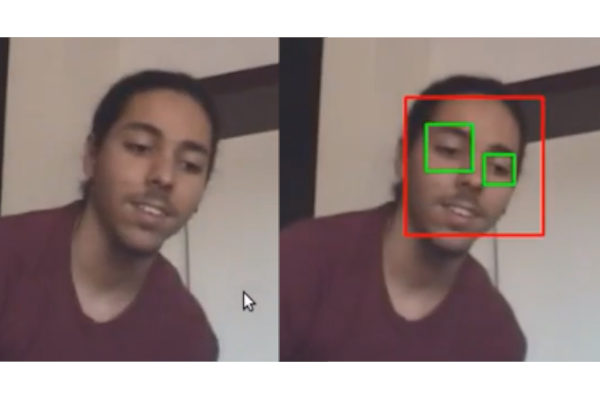
Human Detection
Develop a DL human detection model to perform inference and benchmarking in real time.
Go! running - v3.2

Digit Classifier
Classify digits in real time using your own deep learning model.
Go! running - v.3.2
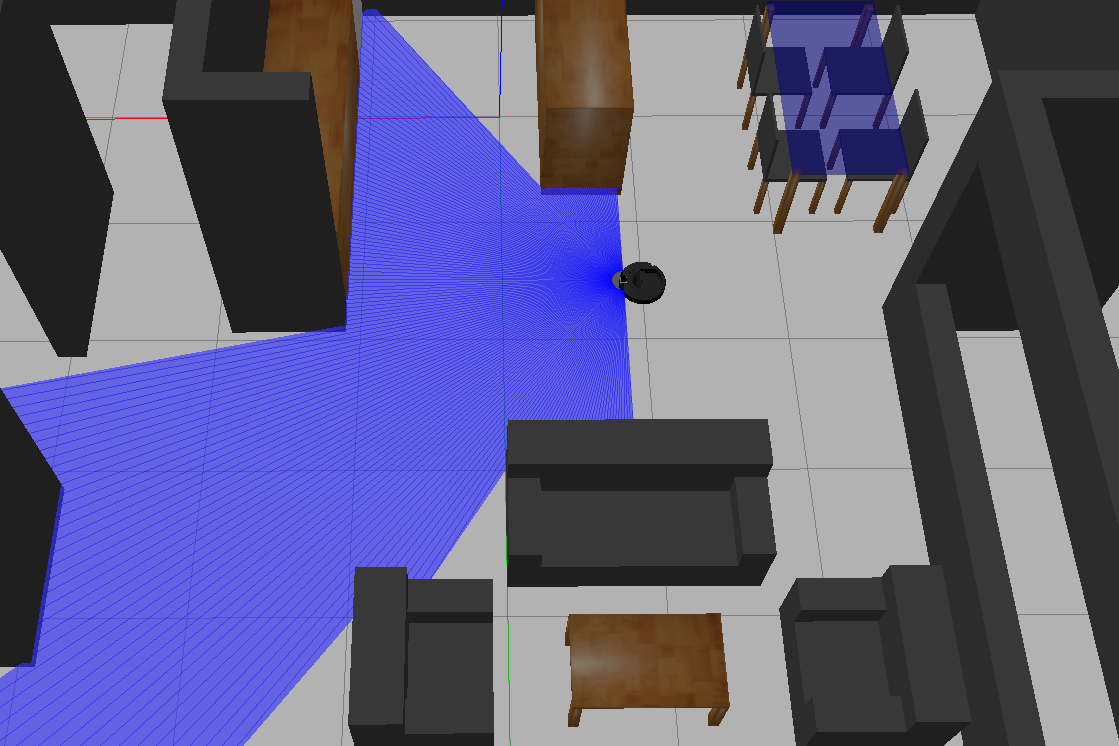
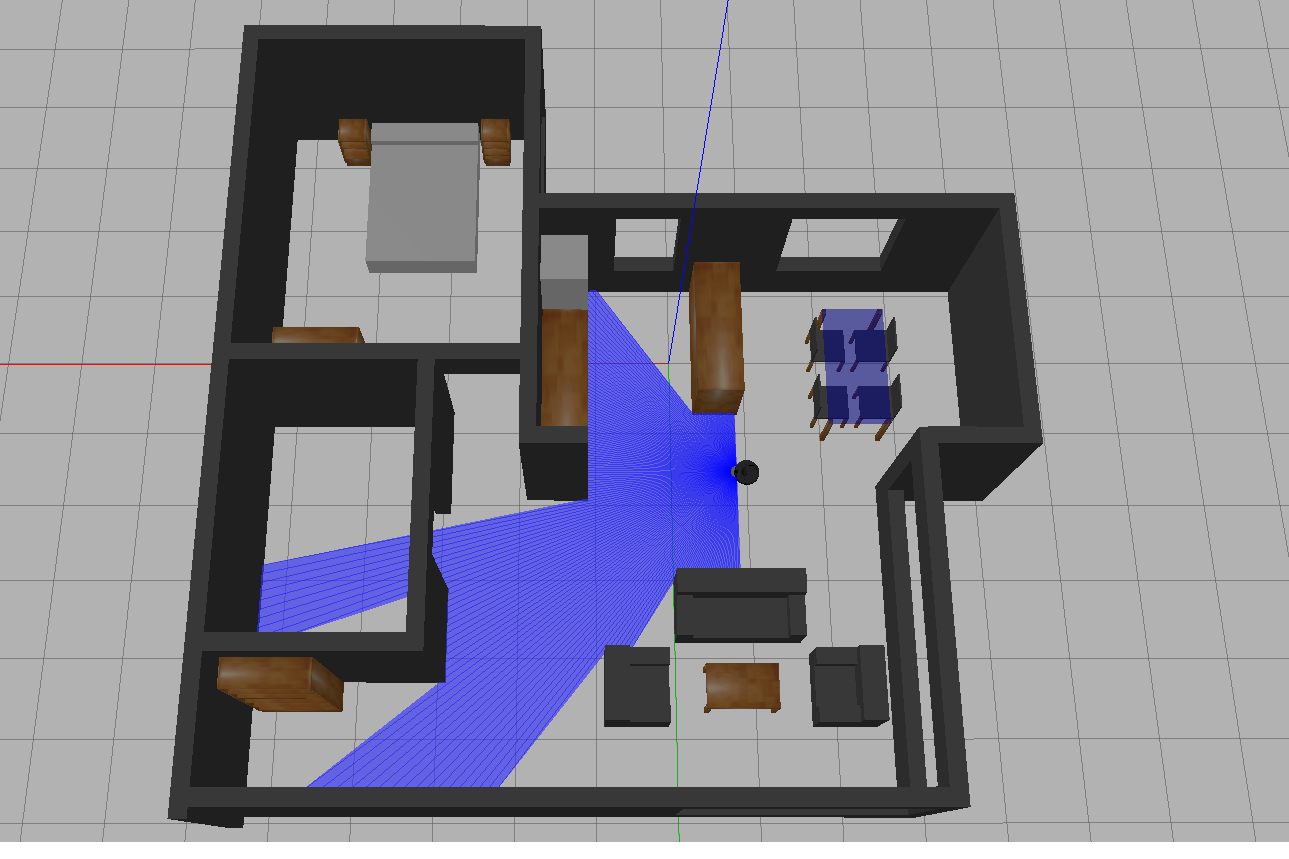
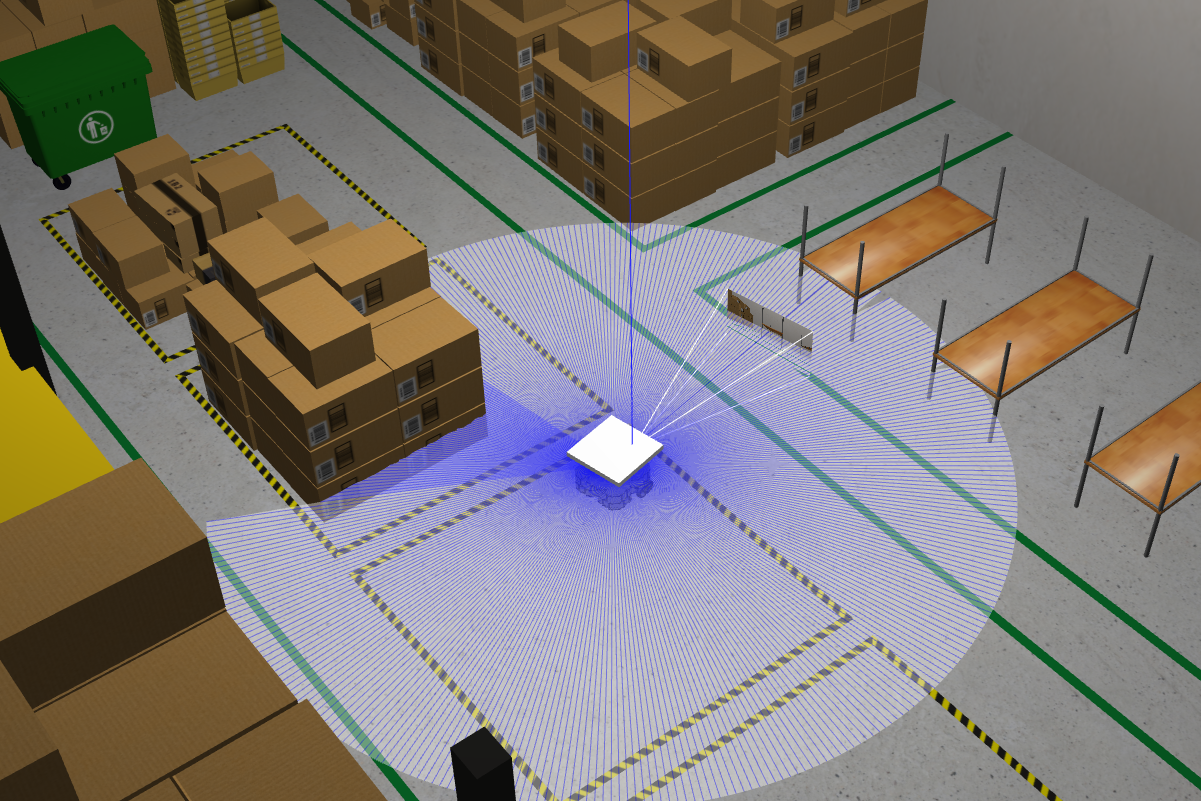
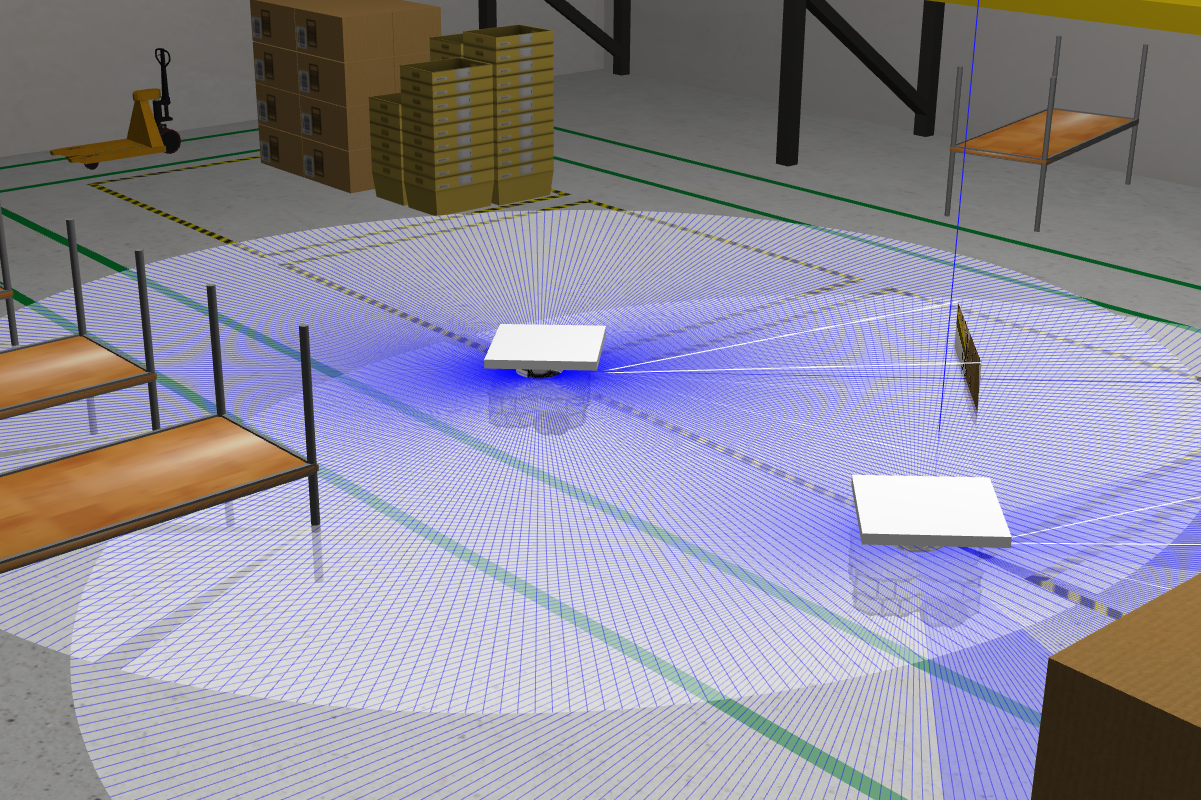
MonteCarlo Laser Loc
Robot self-localization using particle filter and laser sensor
Go! running - v3.2

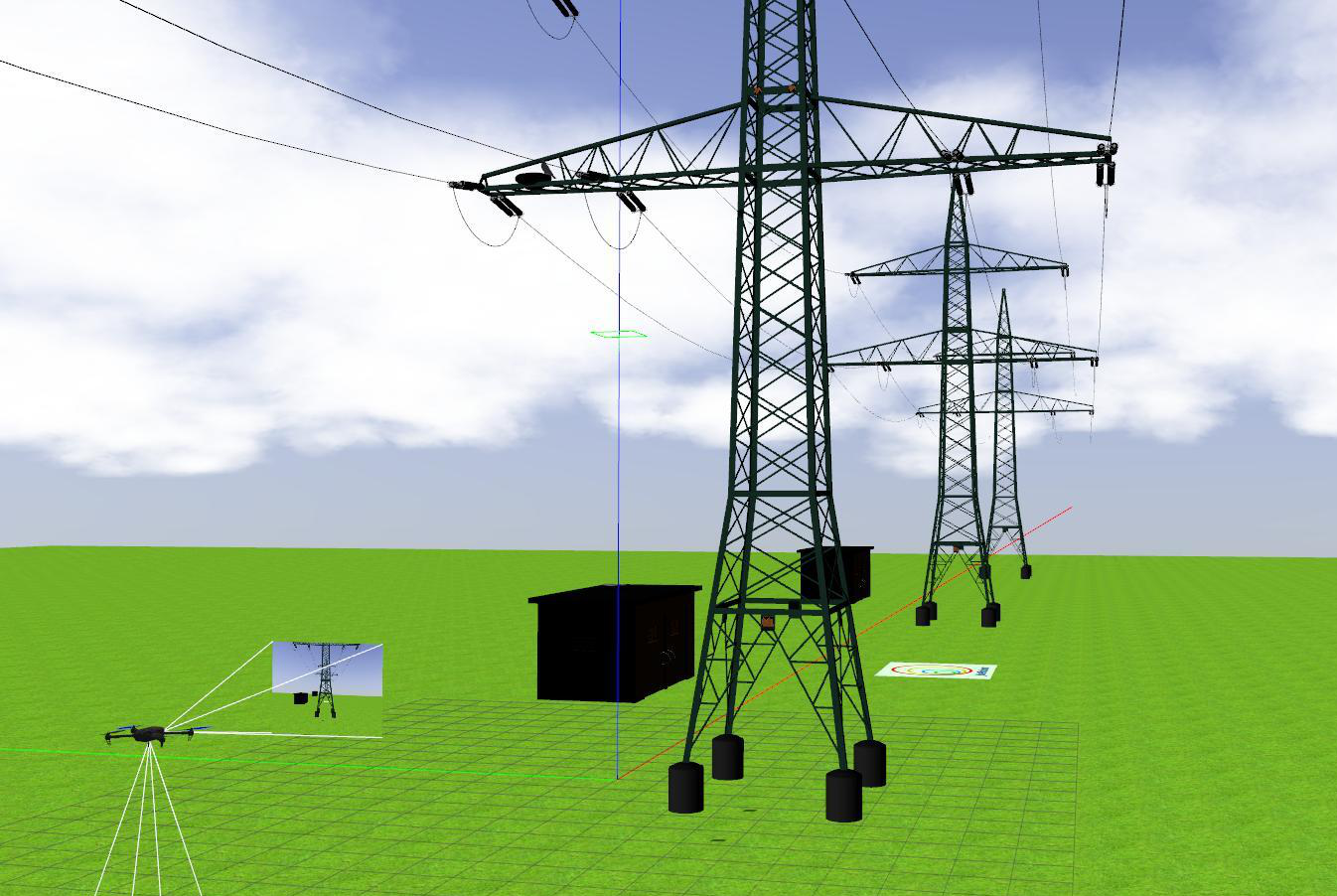
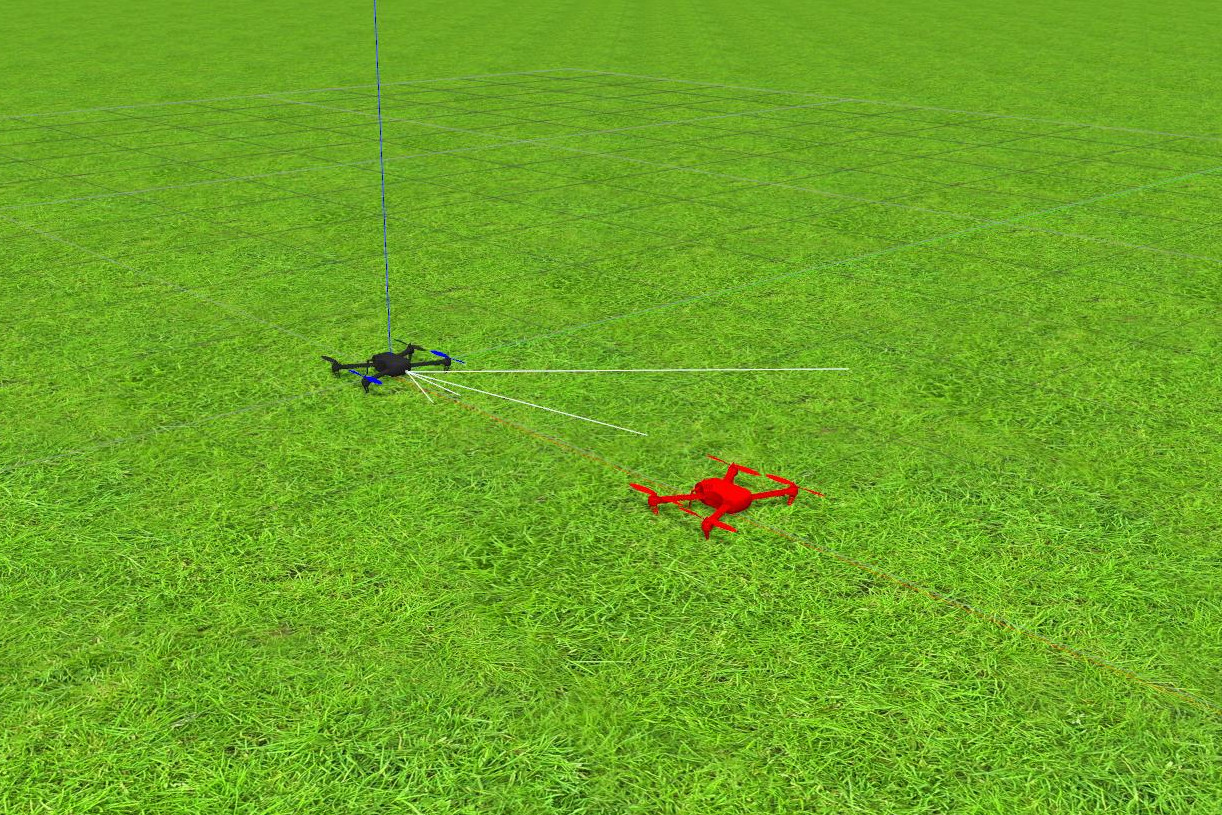
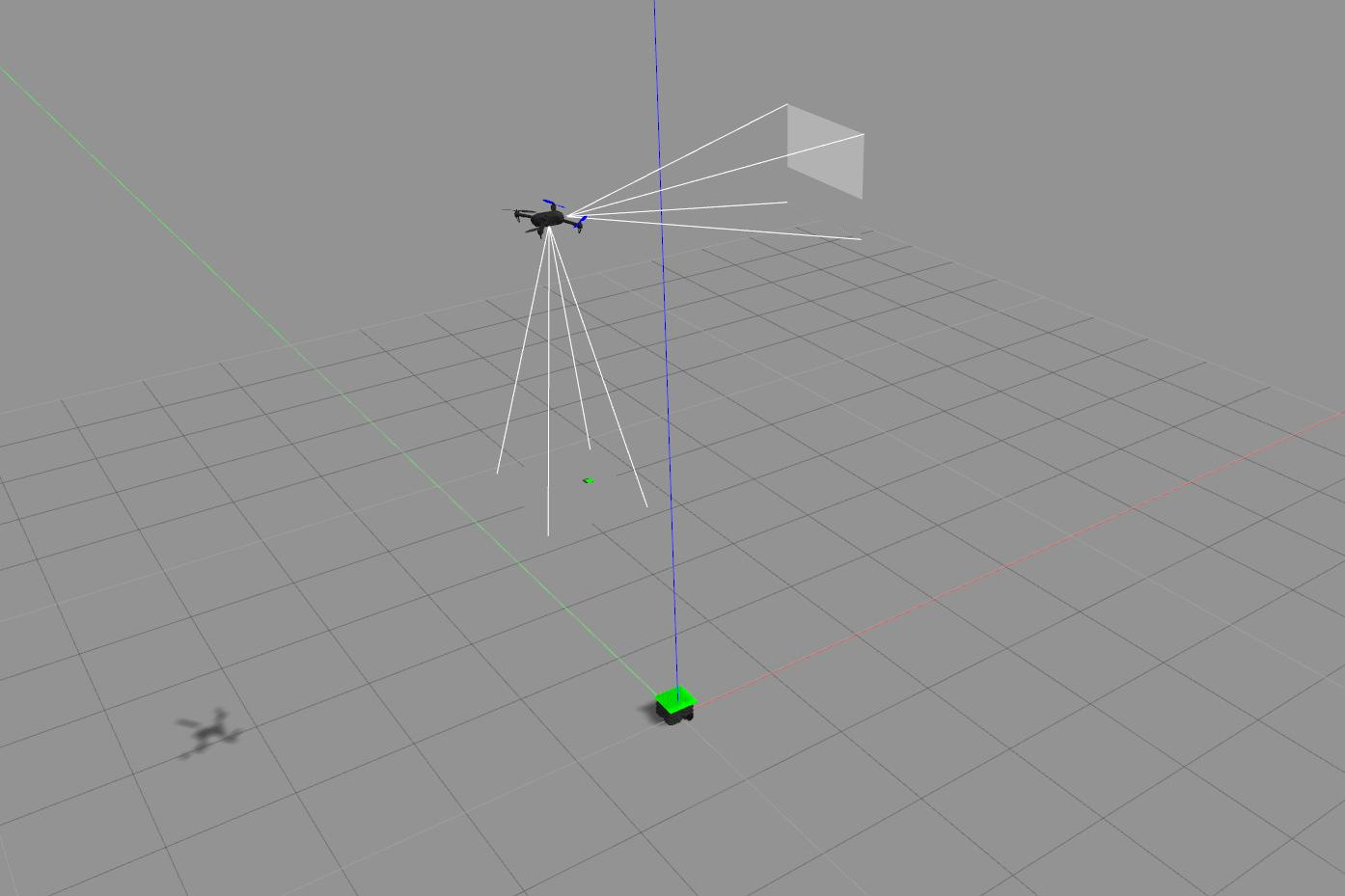
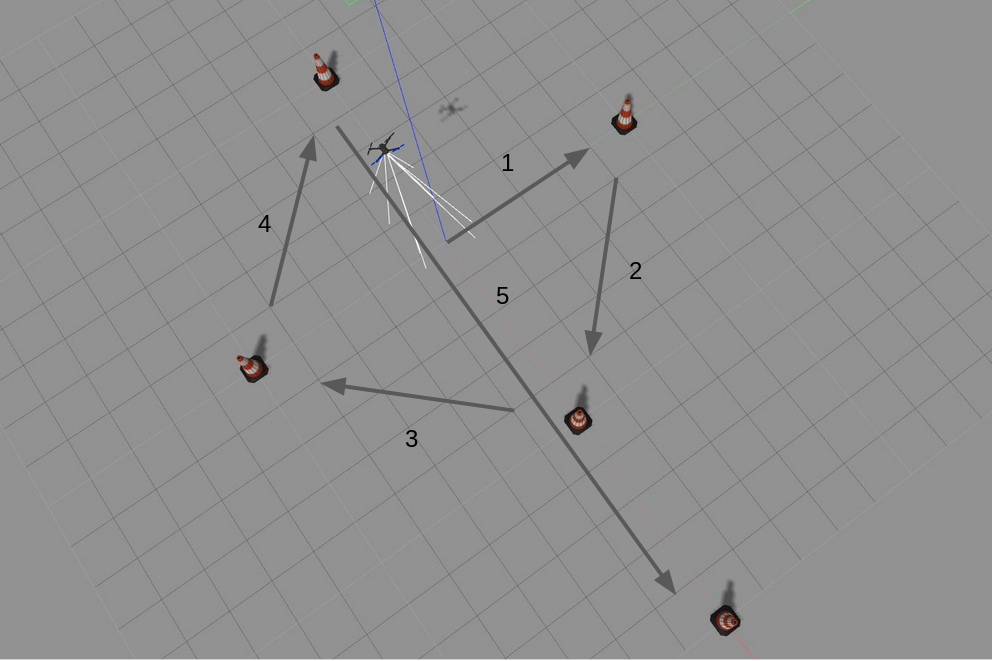
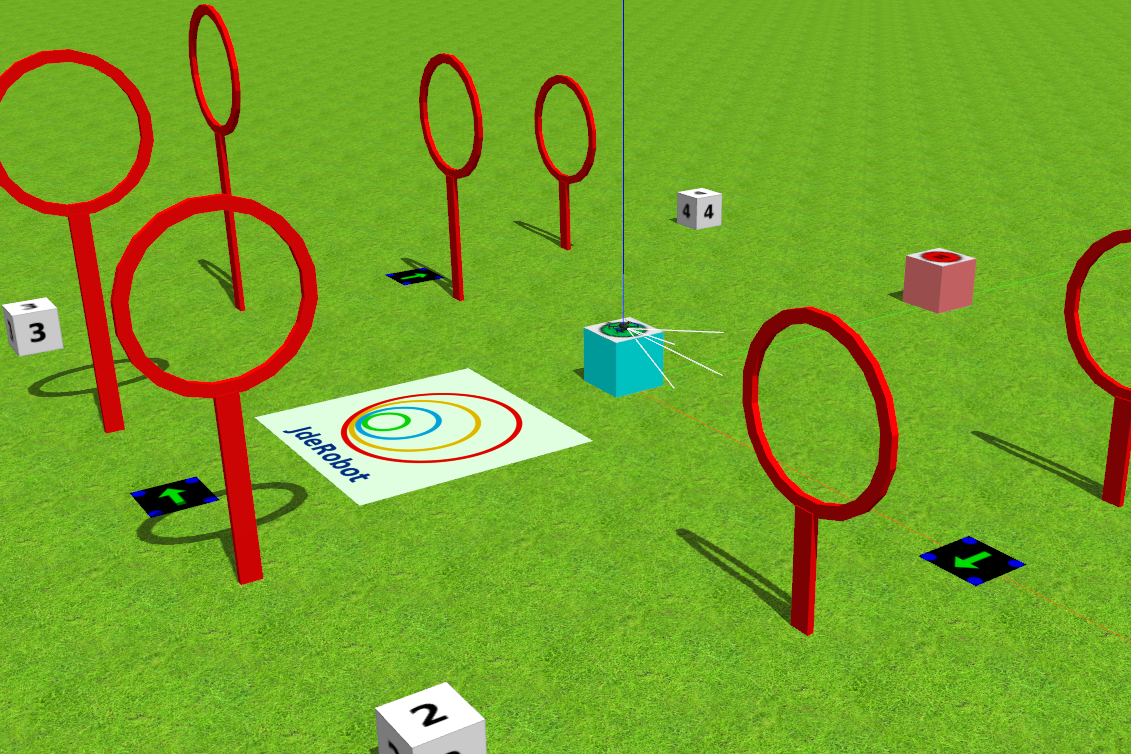
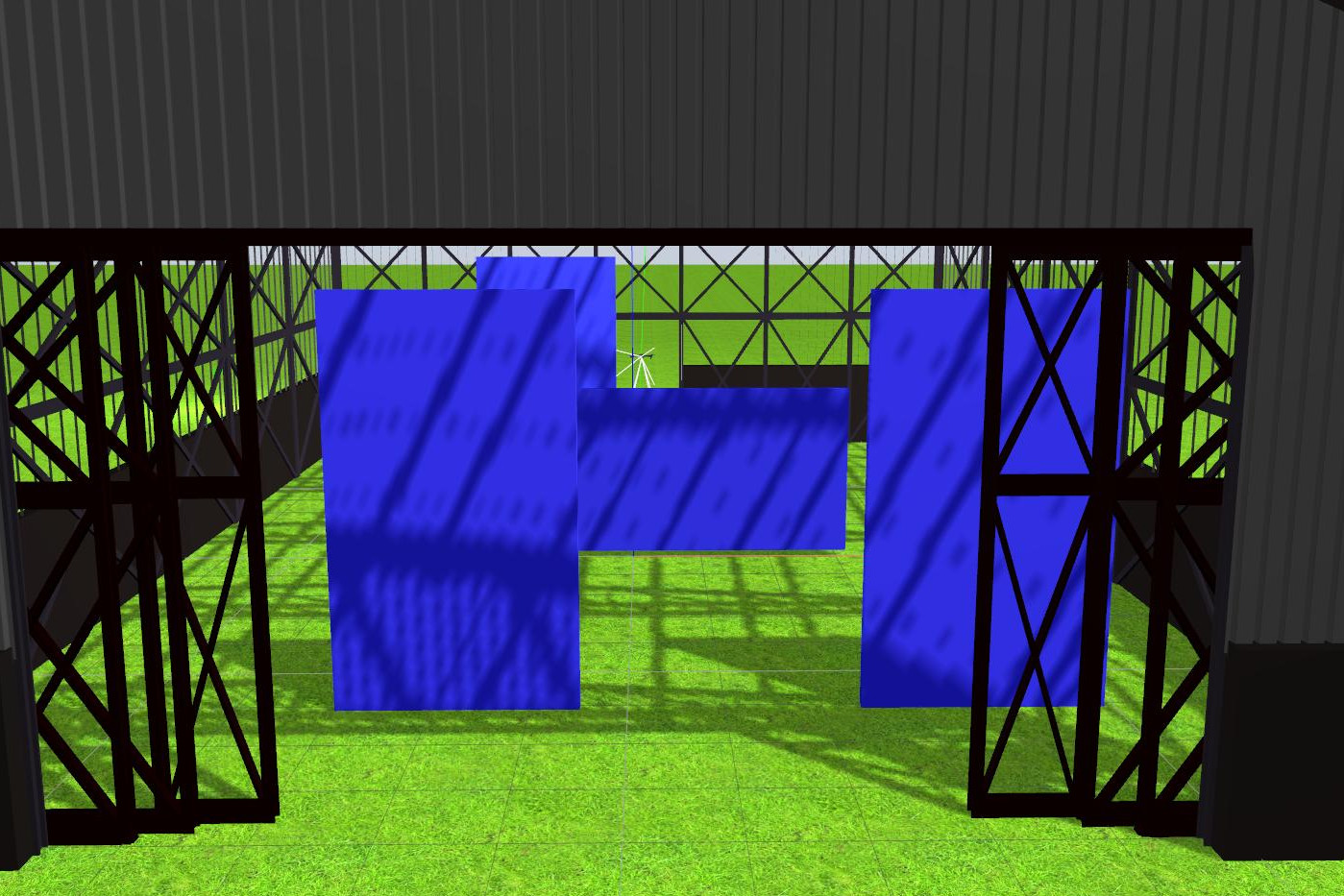
Power Tower Inspection
Perform inspection of the power towers, electrical wires, insulators (spring like object) using a drone.
Go! running - v3.2
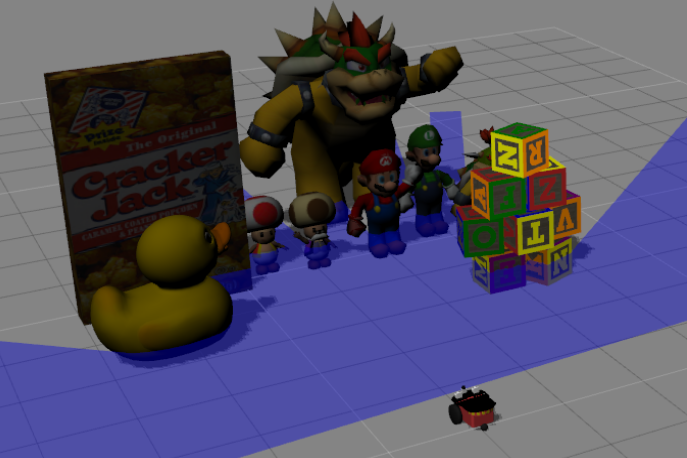
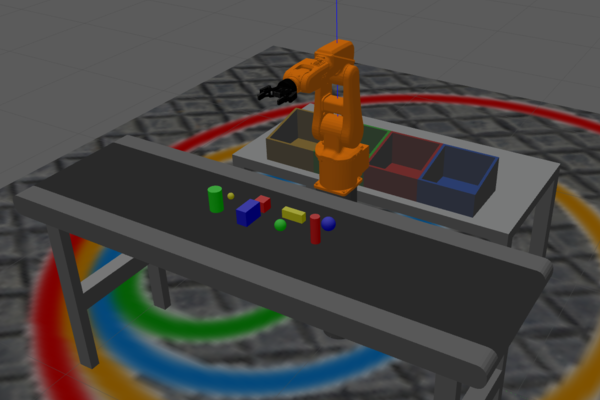
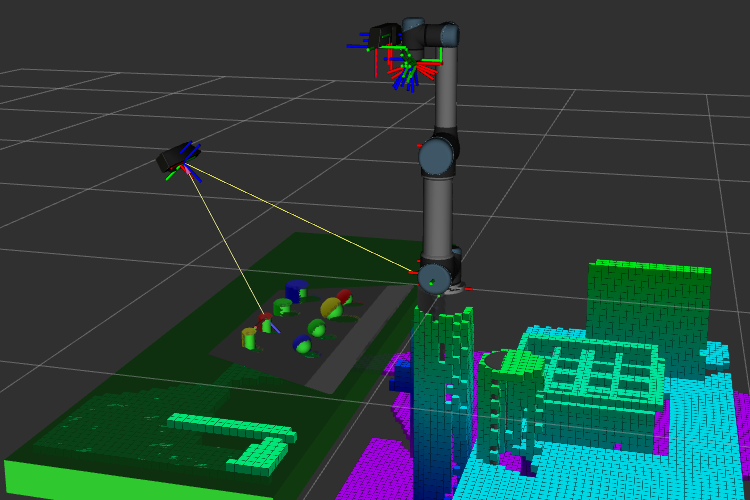
Single Robot Amazon Warehouse (ROS2)
Autonomous navigation and pick-and-place logic in ROS2
Go! prototype


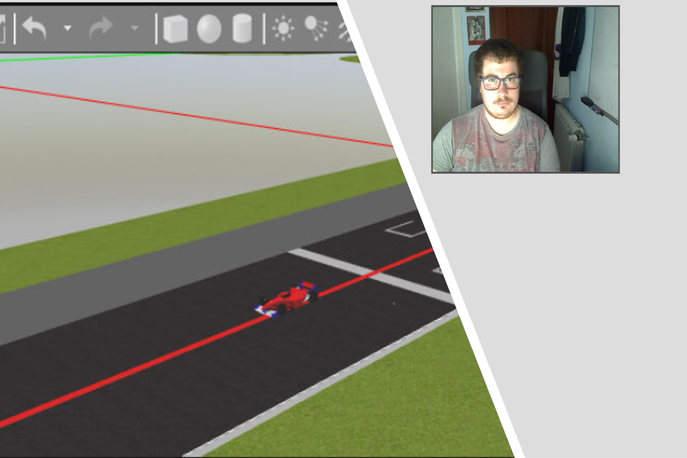
Real Follow Person (ROS2)
Follow a Person using a real TurtleBot2 robot with Deep Learning
Go! prototype